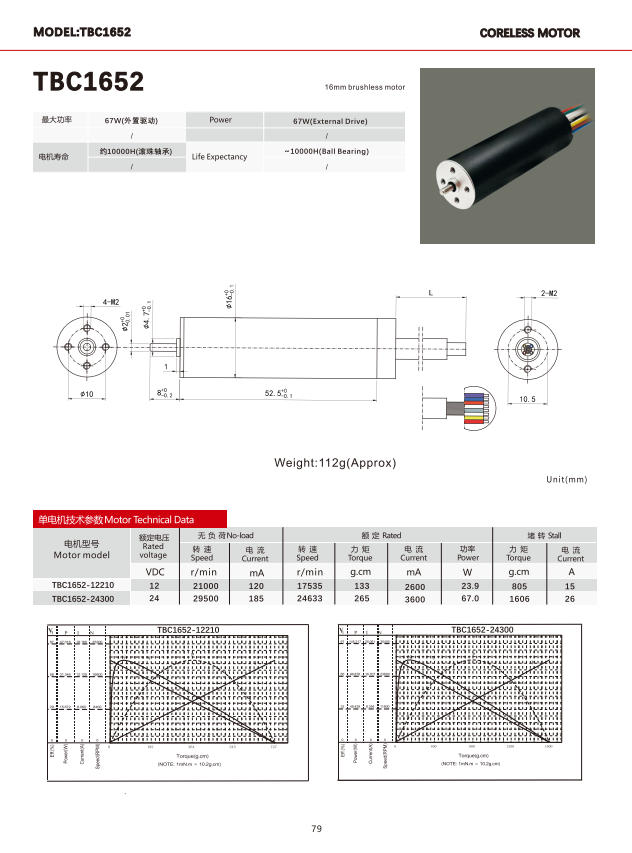
ʻO TBC1652 12V 24V 16mm Long Life High Speed Micro BLDC Motor Electric Brushless Coreless DC Motor No ka Robot





1. Ka hoʻokō pono kiʻekiʻe a me ka mālama ʻana i ka ikehu, ke ola lōʻihi loa
Hoʻopau loa ka hoʻolālā kīʻaha hakahaka ʻole i ka nalowale o ka friction palaki a me ka nalowale o ke au eddy core, me ka pono hoʻololi ikehu o >85% a me ka hana wela haʻahaʻa loa. I hui pū ʻia me nā bearings keramika pale ʻaʻahu, hiki i ke ola ke hiki aku ma mua o 10,000 mau hola, kūpono no nā hui robot a i ʻole nā lako automation e pono ai ke holo i 24 mau hola i ka lā.
2. Hoʻemi liʻiliʻi a me ka māmā
ʻO 16mm wale nō ke anawaena, a ʻo ke kaumaha ma kahi o 110g, kūpono ia no nā hiʻohiʻona i kaupalena ʻia i ka hakahaka (e like me nā hono manamana lima micro robot, nā modula hoʻokele endoscope).
3. Ka wikiwiki kiʻekiʻe a me ka mana kiʻekiʻe
Hiki i ka wikiwiki me ka ʻole o ke kaumaha ke piʻi i 10,000-50,000 RPM (ma muli o ke anakahi uila a me ka hoʻoponopono ʻana i ke kaumaha), kākoʻo i ka hoʻoponopono wikiwiki pololei (PWM/analog voltage), ka loli o ka wikiwiki <1%, ka pololei o ka torque ±2%, a hoʻololi i ka hoʻolālā alahaka robot a i ʻole nā koi hoʻonohonoho mea hana pololei.
4. ʻO ka inertia haʻahaʻa loa, pane wikiwiki
ʻO ka inertia rotational o ka rotor coreless he 1/5 wale nō o ka motika palaki kuʻuna, a ʻo ka manawa mechanical constant he emi ma mua o 5ms, hiki ke hoʻokō i ka hoʻomaka-hoʻōki a me ka neʻe hoʻohuli i ka pae millisecond, e hoʻokō ana i nā pono o ka hopu wikiwiki a i ʻole ka haʻalulu alapine kiʻekiʻe.
5. Ka hiki ke mālie a me ke kū'ē i ke keakea
ʻAʻohe huna ahi a me ka hoʻopilikia electromagnetic (hōʻoia ʻia e CE), walaʻau hana <35dB, kūpono no nā wahi a i ʻole nā hiʻohiʻona e pono ai ka launa pū ʻana o ke kanaka me ke kamepiula.
1. Hoʻohālikelike ākea o ke anakahi uila
Kākoʻo i ka hoʻokomo ʻana o 12V-24V DC, kūlike me nā pila lithium, nā supercapacitors a i ʻole nā mea hoʻoponopono voltage, kahi kaapuni pale overvoltage/reverse i kūkulu ʻia e hōʻoia i ka palekana o nā lako.
2. Hoʻololi ʻana i ka torque kiʻekiʻe a me ka pahu pahu
ʻO ka torque i helu ʻia he 50-300mNm (hiki ke hoʻopilikino ʻia), hiki i ka torque output ke hōʻea i ka 3N·m ma hope o ka hoʻohui ʻana i ka pahu pahu planetary, ka pae hoʻemi o ka lakio 5:1 a i 1000:1, e hoʻokō i nā koi ukana māmā wikiwiki haʻahaʻa a i ʻole nā koi ukana māmā wikiwiki.
3. ʻAno pololei o ka metala āpau
Hana ʻia ka pūpū me ka alumini mokulele, a hiki i nā kia kūloko ke hana i ke kila kila a i ʻole ka titanium alloy, kahi mea e kū'ē i ka pala a he ikaika ka hoʻopuehu wela. ʻO ka pae mahana hana he -20℃ a i +85℃, hiki ke hoʻololi i nā ʻano ʻino.
4. Hoʻohālikelike ka mana akamai
Kākoʻo i ka sensor Hall, ka encoder magnetic a i ʻole ka manaʻo grating, kūlike me nā protocols kamaʻilio CANopen a me RS485, hiki ke hoʻopili maʻalahi ʻia i ka ʻōnaehana mana ROS a i ʻole PLC, a hoʻokō i ke kūlana pani / kaohi wikiwiki.
5. Hoʻolālā modular
Loaʻa nā mana ʻau hollow a i ʻole nā mana ʻau pālua e hoʻomaʻalahi i ka hoʻohui ʻana o nā encoders photoelectric a i ʻole ke kaula hoʻohele ʻana, e mālama ana i ka wahi i loko o nā lako.
1. Nā Lopako
Nā lopako ʻoihana: nā hui lima lopako SCARA, ke koʻi hopu lopako Delta, servo hoʻokele AGV.
Nā robots lawelawe: nā hui manamana lima robot humanoid, ka module hoʻokele poʻo robot alakaʻi.
Nā lopako liʻiliʻi: ka hoʻokele pepeke bionic, ka mea hoʻoikaika lopako nānā paipu.
2. Nā mea hana lapaʻau a me ka pololei
Nā lako hana ʻoki: ka hoʻokele wehe a pani ʻana i nā forceps ʻoki kino minimally invasive, ka hoʻoponopono ʻana i ka nānā ʻana o ka mea hana laser ophthalmic.
Nā lako hana hoʻokolohua: ka hoʻohuli ʻana o ka pā hāpana o ka mea hana PCR, ka module microscope autofocus.
3. Nā mea uila mea kūʻai aku a me nā lako akamai
Nā UAV: motika hoʻopaʻa gimbal, servo ʻēheu pelu.
Nā mea hiki ke komo ʻia: motika hoʻihoʻi manaʻo paʻakikī o ka uaki akamai, motika hoʻoponopono kiko o nā aniani AR.
4. Hoʻokele kaʻa a me ka ʻoihana hana
Ka mana pololei o ke kaʻa: hoʻoponopono kihi hoʻolālā HUD i kau ʻia ma ke kaʻa, ka micro drive throttle uila.
Nānā ʻoihana: ka lima robot lawelawe wafer semiconductor, ka mana hoʻopuka kola mīkini hoʻopuka pololei.