

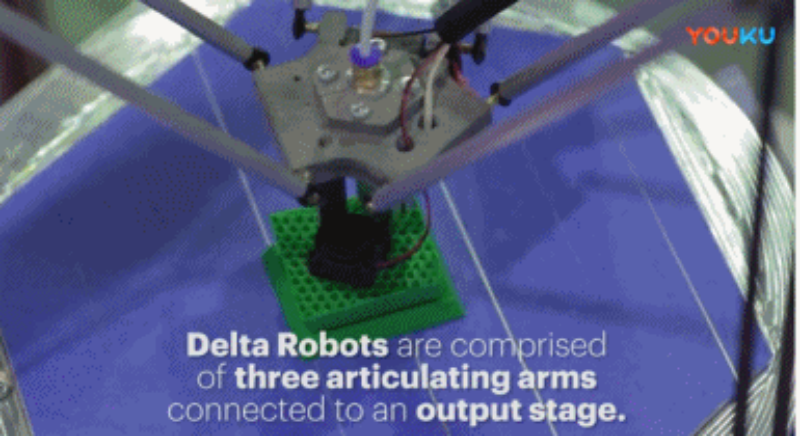
Wahi a nā hōʻike pāpāho haole, hiki ke hoʻohana nui ʻia ka lopako Delta ma ka laina hōʻuluʻulu ma muli o kona wikiwiki a me ka maʻalahi, akā pono kēia ʻano hana i kahi nui. A i kēia manawa koke nei, ua hoʻomohala nā ʻenekinia mai ke Kulanui ʻo Harvard i ka mana liʻiliʻi loa o ka honua o kahi lima lopako, i kapa ʻia ʻo MilliDelta. E like me ka inoa e hōʻike nei, ʻo Millium+Delta, a i ʻole ka minimal Delta, he mau millimeters wale nō ka lōʻihi a hiki ke koho pololei, hoʻopili, a me ka hana ʻana, ʻoiai i kekahi mau kaʻina hana minimally invasive.
I ka makahiki 2011, ua hoʻomohala kahi hui ma ka Harvard's Wyssyan Institute i kahi ʻenehana hana pālahalaha no nā microrobots a lākou i kapa ai he pop-up microelectromechanical system (MEMS) manufacturing. I nā makahiki i hala iho nei, ua hoʻokō nā mea noiʻi i kēia manaʻo, e hana ana i kahi lopako kolo e hoʻākoakoa ponoʻī ana a me kahi lopako pi agile i kapa ʻia ʻo Robobee. Ua kūkulu ʻia ka MilliDelct hou loa me ka hoʻohana ʻana i kēia ʻenehana.
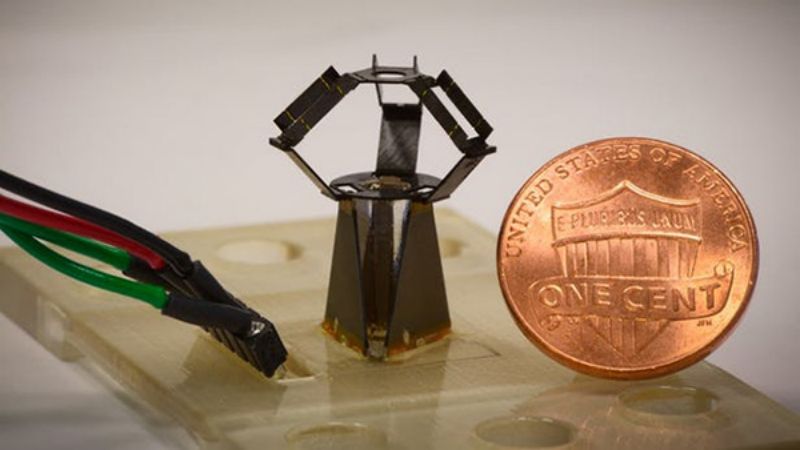
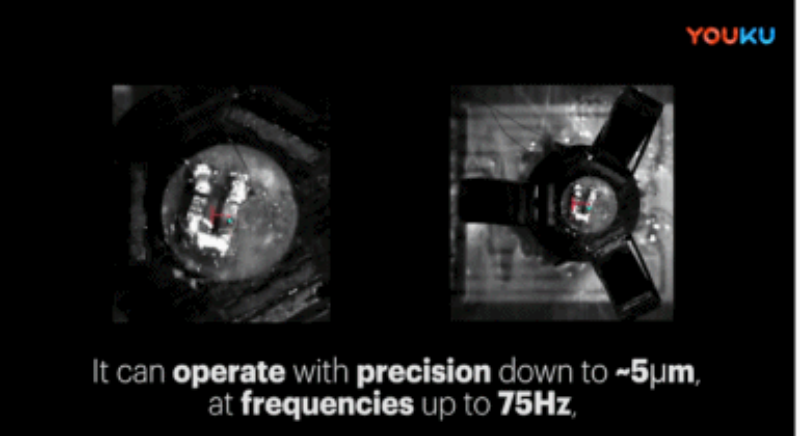
Hana ʻia ʻo MilliDelta me kahi ʻano laminated composite a me nā hui palupalu he nui, a ma waho aʻe o ka hoʻokō ʻana i ka dexterity like me ka robot Delta nui piha, hiki iā ia ke hana i loko o kahi ākea liʻiliʻi e like me 7 cubic millimeters me ka pololei o 5 micrometers. ʻO MilliDelta ponoʻī he 15 x 15 x 20 mm wale nō.
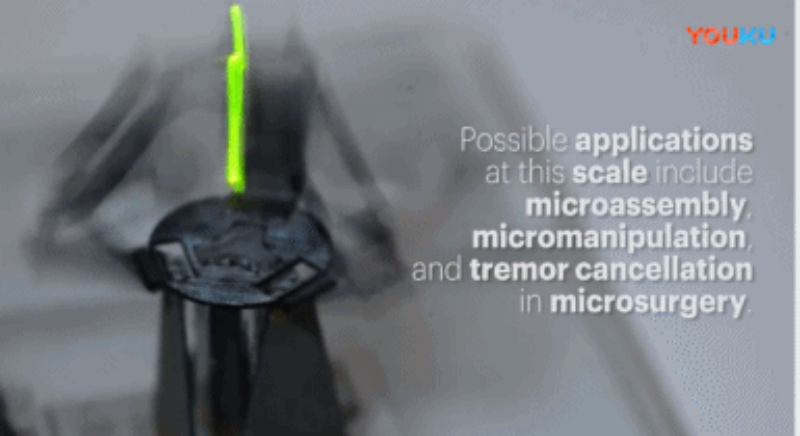
Hiki i ka lima robotic liʻiliʻi ke hoʻohālike i nā ʻano hana like ʻole o kona mau hoahānau nui, e loaʻa ana ka hoʻohana ʻana i ka ʻohi ʻana a me ka hoʻopaʻa ʻana i nā mea liʻiliʻi, e like me nā ʻāpana uila i loko o ka lab, nā pila a i ʻole ka hana ʻana ma ke ʻano he lima paʻa no ka microsurgery. Ua hoʻopau ʻo MilliDelta i kāna ʻoki kino mua, e komo ana i ka hoʻāʻo ʻana i kahi mea e mālama ai i ka haʻalulu mua o ke kanaka.
Ua paʻi ʻia ka hōʻike noiʻi pili ma ka ʻatikala Science Robotics.
Ka manawa hoʻouna: Sep-15-2023