

I nā ʻoihana hana o ka ʻenehana ʻenehana a me ka hoʻokele precision drive, ʻo ka hilinaʻi o ka mana kumu o kahi kaʻa brushless gear e hoʻoholo pololei i ke ola o nā mea hana. Ke hoʻohana nei ma luna o 20 mau makahiki o ka ʻike i ka brushless gear motor R&D, hoʻohui mākou i ka ʻenehana kikoʻī Swiss me kahi hiʻohiʻona honua e hoʻolauna i kahi ʻōnaehana hoʻokele honua holoʻokoʻa i hoʻohui ʻia, e hāʻawi ana i kahi hopena "naʻau-level" no nā mea kiʻekiʻe.
I. Hoʻolālā ʻenehana Hoʻopilikia: Fully Adaptive Power Platform
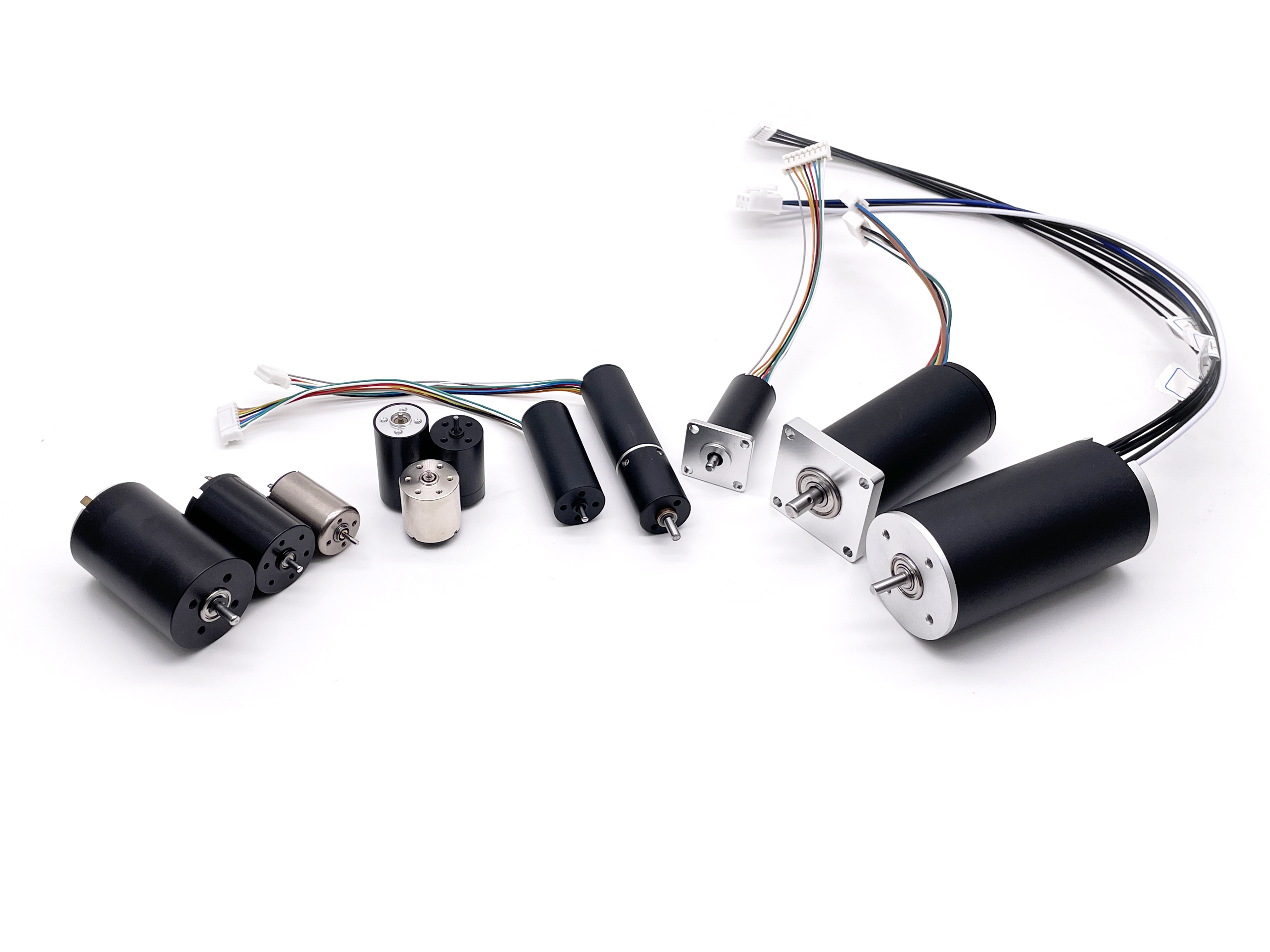
1. Koko Mana Loa-Long-Life
Hoʻolako ʻia me kahi kaʻa brushless i kūkulu ʻia i loko o ka hale me ka hoʻohana ʻana i nā mea aerospace-grade a me ka ʻenehana hobbing mīkini mīkini ʻo Swiss Wall-E (me ka mīkini pololei me ka hoʻohana ʻana i nā mīkini lawe ʻia he 100), kaena kēia ʻōnaehana i ke ola o nā hola 10,000. Ma o ka hoʻouka ʻana i nā algorithms a me ka hoʻomalu wela naʻauao, ua lanakila ʻo ia i nā bottlenecks ola o nā motika brushless maʻamau i nā kaiapuni me ka hoʻomaka pinepine a hoʻomaha, ka haʻahaʻa kiʻekiʻe, a me nā wela kiʻekiʻe. 2. Pūnaehana Hoʻokele Modular
● Kākoʻo ʻelua-Mode Deployment: Kākoʻo ke kaʻa i nā hoʻonohonoho maʻalahi no nā mea hoʻokomo i loko (hoʻokoe ākea) a me waho (hoʻonui i ka wela).
● Pūnaehana Kūkākūkā Naʻauao: Hiki i nā protocol bus 485/CAN ke koho i ka hoʻohui pono ʻana i loko o Industrial IoT 4.0.
●Precision Control: Hoʻohui kiʻekiʻe-pololei multi-turn absolute encoder me ke kuhi kuhi ≤ 0.01°.
2. Palekana Braking Assurance
Loaʻa i ka ʻōnaehana brake electromagnetic akamai ka manawa pane o <10ms a hoʻokō i ka laka zero-displacement i nā kūlana hoʻomaha pilikia, e hōʻoia ana i ka palekana i nā hiʻohiʻona kiʻekiʻe. II. Hana Hoʻohui Vertically Integrated: Hoʻohui i hoʻohui ʻia i nā wahi ʻoihana ʻeha
ʻO ka hoʻolālā ʻelima "motor + reducer + driver + encoder + brake" e lanakila ai i nā palena ʻekolu o nā hoʻonā kaʻawale kuʻuna:
●Hoʻopau i nā poho mechanical docking, hoʻomaikaʻi i ka ikehu e 15%
● Ho'emi i ka uwea waho e 80%, e ho'emi ana i ka hemahema e 60%
● Hoʻopili i ka wahi hoʻokomo e 50%, e hoʻololi i nā kaiapuni paʻa e like me nā hui robotic
Hoʻemi i ka manawa hoʻomohala a hoʻomaikaʻi i ka hoʻomohala huahana
"Ke lilo nei nā mīkini brushless kiʻekiʻe i ke kumu hoʻokō o ka ʻOihana 4.0"
Ⅱ. Nā Pono Hana Hana Naʻauao: Pūnaehana Hōʻoiaʻiʻo Kūlohelohe
Nā Mana Hana R&D, Pākuʻi Hana, a me ka Pūnaehana Pono
He hui ʻoi aku ma mua o 30 mau ʻenehana loea
10 mau laina hana kaʻa brushless piha piha
15 mau makahiki o ka ʻike ma nā kūlana hoʻokele maikaʻi o ka hoʻokuʻu ʻana
ʻO 20 mau makahiki o ka ʻike ma ka waihona ʻikepili hoʻolālā motor brushless
100 mau mīkini hobbing gear Swiss no ka mīkini pololei
Ua hōʻoia ʻia ma nā ʻāina he 150
Ke komo nei mākou i nā hōʻikeʻike honua 15 i kēlā me kēia makahiki (e like me ka Hannover Messe a me ka Shanghai Industrial Expo) e hoʻoponopono pololei i nā pono o ka mea kūʻai aku a hoʻomau mau i kā mākou waihona huahana.
Ⅲ. Nā Palapala Hoʻohālikelike: Ke alakaʻi nei i nā hoʻonui naʻauao honua
Mai ka micron-level motion control for medical robotic arms to extreme-environment operation for new energy equipment, ua lawelawe kā mākou mau hoʻonā:
ʻO nā mea hana mīkini mīkini kikoʻī ʻEulopa (0.1μm hoʻihoʻi hou)
Pūnaehana AGV logistics ʻAmelika ʻĀkau (24/7 mau hana)
Nā lopako hoʻomaʻemaʻe kiʻi paʻi kiʻi Hikina Hema (e hana ana ma nā kūlana wao nahele 85°C)
ʻO ke koho ʻana iā mākou ʻo ia ke koho ʻana:
● Hoʻomohala piha i loko o ka hale: 100% mana kūʻokoʻa mai ka hoʻolālā electromagnetic i nā protocol kamaʻilio
● Pane pae ʻelua: ʻO kā mākou hale hana ponoʻī e hiki ai i 48-hola ka hoʻopuka pilikia
● Waiwai o ke ola: Hoʻemi ka hoʻokele ʻana i ka ikehu holoʻokoʻa holoʻokoʻa i nā koina holoʻokoʻa ma 30%
"ʻO ka holomua hou o nā kaʻa brushless aia i ka hoʻololi ʻana i nā ʻāpana mana i nā nodes data naʻauao" - Electromechanical Systems Expert
Ka manawa hoʻouna: ʻAukake-15-2025